

圖片來源:光明網(wǎng)
從跑“半馬”到運動會,機器人為啥要扎堆搞體育?
“是騾子是馬,拉出來遛遛”機器人測試為何都選體育
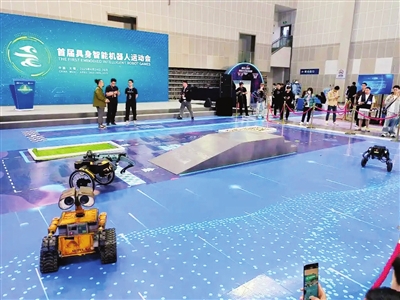
首屆具身智能機器人運動會上的2V2機器人足球比賽,紅藍雙方機器人在模擬綠茵場上攻防交替,貢獻了“腳后跟進球”“中場射門”等名場面;投籃比賽中,機器人“鐵墩”手腕輕扣,十投全中贏得滿堂彩……
“體育競技提供了復(fù)雜多樣的真實場景,對機器人來說意味著從感知環(huán)境到信息分析、再從實時決策到運動控制的考驗,這正是機器人研發(fā)需要的。”在清華大學(xué)計算機博士、體育部博士后李晨曦看來,體育競技是機器人技術(shù)理想的試驗田,也是機器人邁出實驗室、走向真實生產(chǎn)和生活的重要一步。
“是騾子是馬,拉出來遛遛。”一名觀眾的感言一語中的。機器人比賽,正是一種科技綜合測試。
“為什么搞體育?”江蘇一家科技企業(yè)人形機器人事業(yè)部副總經(jīng)理郭大宏說:“就是為了把機器人性能設(shè)計得更穩(wěn)定可靠,向應(yīng)用領(lǐng)域拓展。”
競技體育為機器人研發(fā)測試走出“一條路”,也為機器人走近大眾、走向市場打開“一扇窗”。
“鋼鐵運動員”上場
參賽機器人為何執(zhí)著“人形”
參加北京亦莊半馬的人形機器人“天工Ultra”身高1米8,兩條大長腿擅長奔跑;重心穩(wěn)、續(xù)航長的“旋風(fēng)小子”則是小個頭,腳上穿著童鞋;參加足球?qū)官惖臋C器人“加速T1”身高僅1米2,但射起門來毫不含糊……
這些參賽機器人的“高矮胖瘦”各不相同,但都不約而同地模仿了人形。既是機器,為何執(zhí)著于做“人”?
“機器人要想服務(wù)于人類,首先要適配人類環(huán)境。”東南大學(xué)機器人傳感與控制技術(shù)研究所副所長徐寶國告訴記者,日常生活中從樓梯臺階的高度到門把手的形狀,包括體育場上從運動器械的尺寸到比賽場地的布局,都是按照人類身體結(jié)構(gòu)量身定制的。
在無錫同期舉行的人形機器人百人會會議上,中國科學(xué)院院士、華中科技大學(xué)教授丁漢表示,因為人形機器人具備高度通用的形態(tài),可適用于各種場景和復(fù)雜作業(yè),所以人形機器人是具身智能的最佳載體。
實踐證明,機器人的人形設(shè)計在面對真實生活場景時具有獨特優(yōu)勢。在北京亦莊半馬中,“天工Ultra”機器人就憑借類人關(guān)節(jié)結(jié)構(gòu),成功摘得冠軍獎杯。而采用履帶式設(shè)計的機器人,在面對賽場復(fù)雜地形時表現(xiàn)不盡如人意。
“擬人性”也更易引起人們“共情”。在北京亦莊半馬中,參賽的“小巨人”機器人以雙丸子頭哪吒造型亮相,還用網(wǎng)絡(luò)熱梗與觀眾互動,成為賽場內(nèi)外的“網(wǎng)紅”。
“蹣跚學(xué)步”是為了“健步如飛”
機器人選手為何有點“菜”
北京亦莊半馬的機器人完賽率僅30%,2小時40分42秒的冠軍成績也與人類馬拉松運動員的最好成績相去甚遠;首屆具身智能機器人運動會的足球?qū)官惿希瑱C器人球員被自己絆倒后“負傷”,被工作人員用擔(dān)架抬出賽場……
機器人賽場表現(xiàn)與公眾預(yù)期中的科幻場景有差距,甚至屢屢“翻車”,這與ChatGPT、DeepSeek橫空出世時公眾的驚呼形成反差。
中國工程院外籍院士張建偉表示,ChatGPT和DeepSeek只類似我們處理文本的“腦區(qū)”,但運動等場景涉及“小腦”的控制以及視覺、聽覺、觸感等多模態(tài)的聯(lián)合控制,要復(fù)雜得多。
玄智(深圳)創(chuàng)新科技有限公司賽事總監(jiān)王奕濤說,機器人在動態(tài)復(fù)雜環(huán)境中的運動控制極具挑戰(zhàn),團隊希望在“實戰(zhàn)”中盡可能多地收集反饋數(shù)據(jù),以改進提升。
機器人一小步,人類一大步。機器人運動員現(xiàn)階段如嬰兒般的“蹣跚學(xué)步”,正是為了走向“健步如飛”。
從春晚舞臺跳舞到運動場踢球,這兩者是同一種機器人嗎?專家表示,跳舞與踢球雖同屬“運動”,但動態(tài)控制目標(biāo)、節(jié)奏響應(yīng)與穩(wěn)定策略各不相同。目前機器人大多采用針對性優(yōu)化算法,通用性較差。隨著多模態(tài)融合等關(guān)鍵技術(shù)不斷取得突破,“一專多能”的多面手機器人有望在不遠的未來與我們見面。